|
 |

|
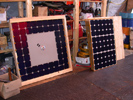
Jim poses by some of the crates that'll ship with us. The bare wooden one behind him houses the 32x47 inch solar panels for the robot, while the one behind it (which looks like a pallet) holds the 47x47 inch top panel.
|
|

|
The robot chassis and solar panels are shipped separately, and will need assembling on site. This image shows the chassis box restrained in its shipping container. The box is tall compared to the robot, because it is being reused from a previous shipment.
|
|

|
The robot is restrained in the shipping crate in a few ways. First, the wheels are tied to the shipping crate with lashing straps. Second, a 2x4 is screwed in just above the top of the tires on the left and right sides. Third, the outriggers extend outwards front-to-back and left-to-right and contact the side walls of the shipping crate.
|
|

|
While transiting through Kangerlussuaq, we were put up in a sort of dormitory (the KISS building, if you read the sign on the red building) by the logistics company Veco Polar Resources. Veco runs the day-to-day operations of Greenland science for the national science foundation. Although these buildings look rather odd from the outside (the walls are poured concrete, and the ice-cube tray look is a remnant of the forms), they are quite cozy inside with all the necessary amenities.
|
|

|
Off to one side of town, on the road leading to the lake in the radar station and lake (below), is a bridge that crosses over the outlet to a glacial river. This is the downstream spillway in full flood. The color has not been tinkered with; it really is the color of mocha - the result of tons of silt being released from the ice. This is the start of a tremendous fjord that extends from Kangerlussuaq over 100 miles to the sea.
|
|

|
Back when Kangerlussuaq was primarily an Air Force base (today, it still revolves almost exclusively around the airport, which is no longer a USAF entity), there were radar stations set on the hills outside of town. Today, I am told, they are used for communicating with other towns further along the fjord, up to tens of miles away. I thought it would look nice in black and white.
|
|

|
From the top of a ridge a few kilometers to the south and east of Kangerlussuaq, one has a nice view of the fjord running out to sea. One can tell from this image that all the silt from the glacier is gradually filling the head of the fjord in. During most of the year, there is no water access to Kangerlussuaq - the water is too shallow. The nearest port is several miles further downstream. The next picture was taken at the head of the lake to the left of center.
|
|

|
This is a lake a few kilometers from the middle of Kangerlussuaq, and is the source of their water supply. This image was taken around 9 pm in mid-August, looking towards the east. Greenland is indeed green.
|
|

|
Although it is indeed green from a distance, I found the hills around Kangerlussuaq could best be described as rocky. It is very similar to the high desert regions of the American southwest. Here, I found a patch of red lichen clinging to some very tortured rock.
|
|

|
Transportation between Kangerlussuaq and Summit Camp is via specially-equipped LC-130 airplanes operated by the 109th Air National Guard unit. Between Kangerlussuaq and the start of the ice sheet, this is pretty much the view one sees: a rocky and sculpted landscape, dotted with many lakes originally carved by the glacier itself and now renewed by annual snowfall.
|
|

|
In the foreground: our cargo pallet, containing a number of boxes that hold the entirety of our gear and equipment for work in Greenland. The robot chassis is contained in the big yellow box on the corner (see below). In the background, the LC-130 that got us here.
|
|

|
While cozy permanent structures exist for the seasonal staff, the visiting researchers are housed in heavyweight tents made for mountaineering expeditions.
|
|

|
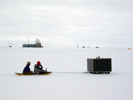
For the first few days at Summit, there were a pair of unusual visitors. A pair of Swedes were staying/resting/reprovisioning at Summit camp during their attempt to cross Greenland south to north on skis.
|
|

|
Boldly forging onward, pulling hundred kilogram sleds along behind them. A few hundred kilometers still to go...
|
|

|
The center of Summit Camp is the Big House - a double-wide trailer. It houses the kitchen, entertainment center, comm center, and laundry. The sphere on top is an enclosure for a large radio dish for our link to the outside world. To stay above the snow surface, the Big House needs to occasionally be jacked up higher, as happened during our stay at Summit. By the time they were done, the house was nearly to the top of the vertical supports.
|
|

|
While heated workspace can sometimes be at a premium at Summit, we were lucky enough to squeeze into one half of the garage. Not only did we then have access to a wider array of tools than we had brought with us, but we had easy access to the outside through the large doors meant to admit much heavier equipment.
|
|

|
One example of heavier equipment is this - the SnowCat used for hauling some heavy equipment around and for grooming the packed runway.
|
|
|
After a journey of a few thousand miles, it is refreshing to see that the solar panels arrived unscathed.
|
|

|
Assembling the solar panel box requires a high tolerance for tedium - many, many screws to put into place!
|
|

|
The interior of the robot is, as ever, a rat's nest of wires and circuit boards. This is not even as bad as it usually was - this early in the reassembly process, there are still a fair number of external wires to attach.
|
|

|
The leads for the five solar panels were intended to be snaked out from the chassis and up through the mast to Molex connectors, which would connect to corresponding cables coming from each solar panel. Then there were the wires for three ultrasonic sinkage sensors. Add in the wires that needed to stretch to the top of the robot, for the radio, kill switch, programming, and GPS, and it is no wonder that we scrapped this idea of snaking them through the mast and simply cut a new hole in the chassis lid.
|
|

|
It took us only an afternoon to unpack and reassemble the robot enough to get the chassis driving around via radio control. Solar power would be something we would gradually work in as we moved along. In the background, the Caterpillar D6 used for lots of heavy jobs around Summit, primarily moving massive amounts of snow.
|
|

|
For the first day or two of testing, we did mostly qualitative testing of the robot's mobility capabilities: driving it over various snow conditions, over steep ridges, observing its traction and ability to pull loads, and so on. Here, one can see that the robot, even fully weighted down, does not sink as much as I do in my mukluks. The snow conditions here were 3-5 inches of fresh powder of a windpacked crust. While walking around, our boots would routinely break through this crust, while the robot would simply ride on top of it.
|
|

|
One morning, while taking walking behind the robot and dragging a sled of equipment for quantitatively measuring the strength and cohesion of the snow underfoot, we realized what fools we were to man-haul the equipment ourselves. And, for that matter, how silly even to walk. So, we hooked the sled to the robot and went for a ride. The robot, it turns out, can haul its own weight (nearly 200 lbs.) on a sled and hardly notice it.
|
|
|
Later, as we sought to quantify the towing capacity of the robot over different snow conditions, we added a load cell to the back of the robot, and gradually added more weight to the sled until we broke traction and/or stalled the robot. Here, the robot tows just two of us, but was able to drag three behind it before starting to have problems making headway.
|
|

|
As the ultimate test, we tried to get the robot to pull the Pig - a 200 gallon water tank mounted on a sleigh. The Pig is used to carry liquid water from where it is melted (at the generator shack) to the Big House where it is used. Typically, this is done with a tracked Argo, because the fully-loaded Pig sleigh weighs in at over one ton. Empty, it is a more modest 400 lbs. This was at the very limit of the robot's capabilities.
|
|

|
The challenge is met! One of the mechanics decided to build his own robot that can haul stuff around. Based on the massive snowblower used in camp (which drives itself forward on a set of tracks), and powered by the, uh, biomass in the latrine at the end, this robot surely gives ours a run for the money.
|
|

|
This image was another born out of spontaneity, and yet has become of the most popular images from the whole project. Snow surfing behind the robot is not very exciting however; it only travels at a slow walking pace.
|
|

|
In Antarctica, we anticipate that the robot will routinely have to drive over sastrugi: wind-packed ridges of snow that are (typically) 15-30 cm tall and spaced about every 2 meters. We didn't have any sastrugi at Summit, so instead drive over some snow berms kicked up by the D6. The robot drove over everything we threw at it.
|
|

|
From another angle - another attack.
|
|

|
And another.
|
|

|
We were also able to shoot some brief video of the robot in action as it tackles these obstacles. I apologize for the poor contract - it was extremely bright from this angle, and the camera had difficulties keeping up.
|
|

|
Another video clip, this one much easier to watch.
|
|

|
After spending the first couple of days focusing on the robot's mobility with the reliability of battery power, we began bringing the solar power system online. Here, we lay the solar panel box off to one side, and the chassis with its wheels off the ground, so that we can run the robot in place and troubleshoot the electronics. We began with just one panel at a time, and then gradually worked out way to 2, 3, and 4 panels supplying power. Unfortunately, during the debugging, we burnt through enough spare parts that we couldn't get all five online simultaneously.
|
|
|
The weather, by and large, was quite cooperative. During the first week or so we experienced overcast skies all day. However, right around the time we started working on the solar power system, we entered a week-long clear spell. Here, the robot is driving under blue skies with just solar power.
|
|

|
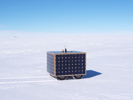
Behold the power of solar! The robot is the black spec in this image, making its way autonomously through an 14 km course we laid out for it, powering itself from the waning sunlight. High-altitude ice crystals result in an impressive halo about the sun. [This image has been photoshopped to highlight the contract between snow, sun, sky, and halo].
|
|

|
Behold the power of solar, take 2.
|
|

|
With the sun beating down it all day, the snow sublimates and creates a layer of moist(er) air just above the surface. As the sun sinks to the horizon, the temperature drops, and that moisture condenses as an icy fog. With a polarizing lense and the right conditions, one can see spectacular multiple rainbows opposite the sun.
|
|

|
The robot navigates from one GPS waypoint to the next, spaced kilometers apart, making course corrections every 10 seconds. Depending on the snow conditions, the robot's four wheel drive can cause it to list to the right or left between corrections (this will be something we'll work on in the future), resulting in scalloping tracks across the snow.
|
|

|
Several days later, as we lifted off from Summit in the LC-130, Jim and I kept a close look out for the tracks of the robot, which passed on the northern side of the Skiway. Jim was able to get this and the next shot. It is difficult to see in the thumbnail, and difficult to see in the low contrast full image, but one can make our the robot's tracks as it turns north, Jim's boot prints, and a snowpit he dug while measuring the snow's strength.
|
|

|
One can, if one looks carefully in the full-sized image, see two sets of tracks from the robot on separate days. The starting point of the robot was different on the two days, which is shown by how the two tracks are a distance apart, but steadily converge.
|
|

|
A short video clip demonstrating the robot making a sharp turn after reaching one waypoint and adjusting its course to the next.
|
|

|
How far out did we send it on these autonomous runs? Check out this video clip to get a sense, taken just in front of the Big House. The robot is the small square rectangle just right of center when we zoom in. At its furthest, the robot would be some 7 km off. At its closest, still almost 3 kilometers. During these autonomous runs, once we set it in motion, we would sometimes remain behind and let it do its thing, checking up on it with binoculars every now and then.
|
|

|
By early August, there were clear signs of the impending end-of-season. The overnight temperatures were starting to drop to the -10 Fahrenheit range. Near the end of our stay at Summit, we encountered First Sunset - the say when the orb of the sun drops entirely below the horizon for the first time since the end of winter. Since the sun slides, rather than dips, towards the horizon this far north, one encounters an hours-long twilight.
|
|

|
One does not typically think of Greenland for beautiful sunsets, but here is a fine one we saw not too long before our departure.
|
|
| All images are the property of the Cool Robots project. Unauthorized reproduction is not permitted. |
|
